论文
这里按年份整理代表性论文。最新工作默认展开,较早年份折叠收起,让页面在继续增长时仍然保持比例与秩序。
研究档案
这里不把论文当成连续更新流,而把它们看作具身智能、协同控制与机器行为研究逐步成形的证据。
2026
3 篇近期论文
收起
展开
2026
3 篇近期论文

Cross-Robot Behavior Adaptation through Intention Alignment
Science Robotics, 2026
研究如何通过意图对齐实现不同机器人平台之间的行为适应。
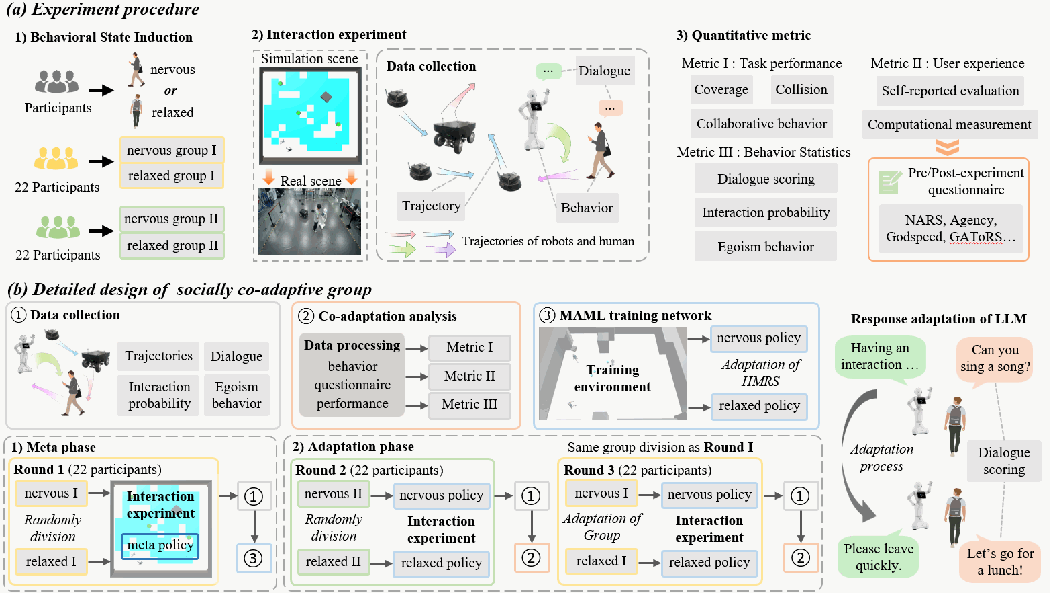
Emergent Co-Adaptive Strategies in Heterogeneous Multi-Robot Systems via Meta-Learning
IEEE International Conference on Robotics and Automation (ICRA), 2026
围绕异构机器人团队的共适应策略,研究系统如何在自利与协作之间动态切换,并在人机共处场景中形成稳定协调。

ReBeCA: Unveiling Interpretable Behavior Hierarchy behind the Iterative Self-Reflection of Language Models with Causal Analysis
arXiv, 2026
通过因果分析理解语言模型迭代自反思背后的可解释行为层级,揭示推理路径与行为模式之间的结构关系。
2025
7 篇论文
收起
展开
2025
7 篇论文
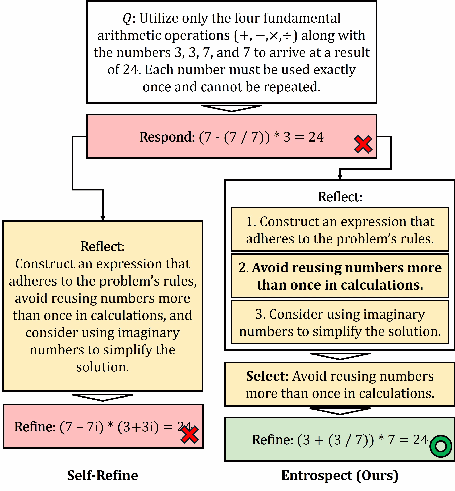
Entrospect: Information-Theoretic Self-Reflection Elicits Better Response Refinement of Small Language Models
Findings of ACL, 2025
从信息论角度重新审视小语言模型的自反思机制,提升回答修正的质量与效率。
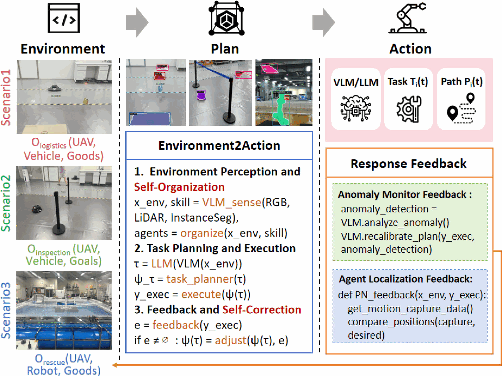
OC-HMAS: Dynamic Self-Organization and Self-Correction in Heterogeneous Multiagent Systems Using Multimodal Large Models
IEEE Internet of Things Journal, 2025
利用多模态大模型处理异构多智能体系统中的分工、规划与自纠错,让多主体协作具备更强的动态适应能力。
Unlocking Drone Perception in Low AGL Heights: Progressive Semi-Supervised Learning for Ground-to-Aerial Perception Knowledge Transfer
IEEE Transactions on Intelligent Transportation Systems, 2025
通过渐进式半监督学习实现地面到低空无人机视角的感知知识迁移,缓解视角变化带来的语义偏差。
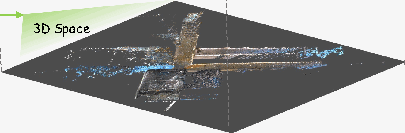
VLONS: Vision-Language Based Occlusion-Aware Neural Rendering System for Multi-View Scene Understanding
IEEE消费电子汇刊, 2025
面向遮挡场景的视觉语言神经渲染系统,用于多视角场景理解,强调结构恢复与遮挡鲁棒性。
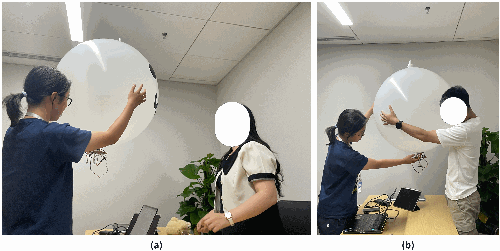
Understanding Users' Perceptions and Expectations toward a Social Balloon Robot via an Exploratory Study
ACM用户界面软件与技术研讨会(UIST), 2025
一项探索性研究,了解用户对社会气球机器人的看法和期望。

Towards VLM-Based Physical Intelligence: Fine-Grained Understanding of Object’s Deformability from Images
arXiv, 2025
探索视觉语言模型如何从图像中理解物体可变形性的细粒度特征,为物理智能建模提供新思路。
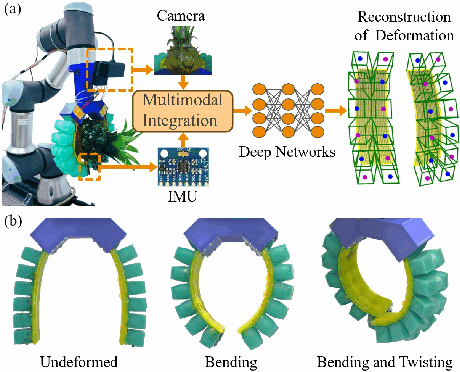
Multimodal Deformation Estimation of Soft Pneumatic Gripper During Operation
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
结合视觉与惯性传感数据估计软体气动夹爪在工作过程中的形变状态,强调多模态观测的互补性。
2024
4 篇论文
收起
展开
2024
4 篇论文
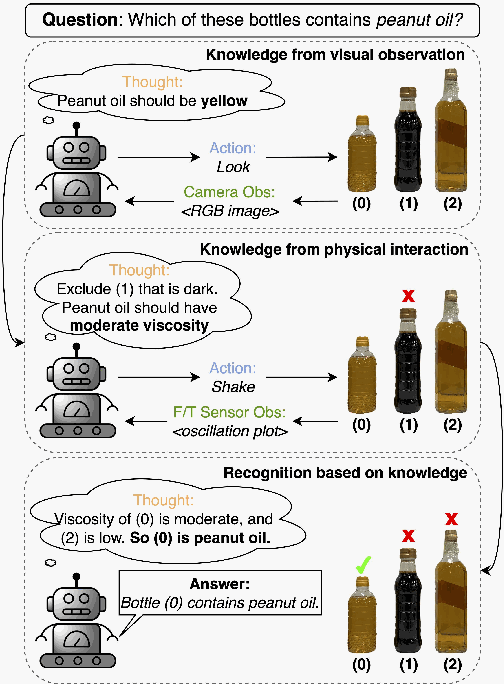
Robot Liquid Perception Through Physical Reasoning and External Knowledge Injection in VLMs
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
结合物理推理与外部知识注入,让视觉语言模型更稳定地识别液体状态与相关物理属性。
Cooperative Surface Inspection with Heterogeneous Mobile Robots Using Deep Reinforcement Learning
手稿, 2024
面向异构移动机器人协同表面巡检的深度强化学习框架,强调协同调度与任务分解。
Transformable Inspection Robot for Infrastructure Maintenance with Large Language Model-Based Agentic System
IEEE International Conference on Advanced Robotics (ICAR), 2024
将可变形巡检机器人与大语言模型代理系统结合,用于基础设施维护中的任务规划与行动协同。
PepperPose: Leveraging Physical Symmetry for Fast and Stable Human Pose Estimation
arXiv, 2024
利用身体对称性的先验提升人体姿态估计的速度与稳定性,兼顾效率和鲁棒性。
2023
5 篇论文
收起
展开
2023
5 篇论文
Asymmetric Self-Play-Enabled Intelligent Heterogeneous Multirobot Catching System Using Deep Multiagent Reinforcement Learning
IEEE Transactions on Robotics, 2023
Learn2Agree: Fitting with Multiple Annotators Without Objective Ground Truth
TML4H Workshop at ICLR, 2023
Asymptotically Efficient Estimator for Range-Based Robot Relative Localization
IEEE/ASME Transactions on Mechatronics, 2023
An Intention Inference Method for Space Non-Cooperative Target Based on BiGRU-Self Attention
Advances in Space Research, 2023
Boosting Lightweight Depth Estimation via Knowledge Distillation
International Conference on Knowledge Science, Engineering and Management (KSEM), 2023
2022
7 篇论文
收起
展开
2022
7 篇论文
Multilevel Hierarchical Network with Multiscale Sampling for Video Question Answering
手稿,2022
2021
6 篇论文
收起
展开
2021
6 篇论文
Temporal Pyramid Transformer with Multimodal Interaction for Video Question Answering
手稿,2021
Invariant Filtering for Bipedal Walking on Dynamic Rigid Surfaces with Orientation-Based Measurement Model
手稿,2021
Meta Reinforcement Learning Based Sensor Scanning in 3D Uncertain Environments for Heterogeneous Multi-Robot Systems
手稿,2021
Leveraging Activity Recognition to Enable Protective Behavior Detection in Continuous Data
ACM人机交互交互式移动可穿戴技术汇刊(IMWUT), 2021
A Dataset of Human and Robot Approach Behaviors into Small Free-Standing Conversational Groups
PLOS ONE, 2021
Ab-Mapper: Attention and BiCNet Based Multi-Agent Path Finding for Dynamic Crowded Environment
arXiv预印本 arXiv:2110.00760, 2021
2020
3 篇论文
收起
展开
2020
3 篇论文
Machine Behavior Development and Analysis Using Reinforcement Learning
博士论文,Uppsala University,2020
Recognizing Micro-Expression in Video Clip with Adaptive Key-Frame Mining
arXiv预印本 arXiv:2009.09179, 2020
Efficient Learning of Socially Aware Robot Approaching Behavior Toward Groups via Meta-Reinforcement Learning
IEEE/RSJ智能机器人与系统国际会议(IROS), 2020
2019
3 篇论文
收起
展开
2019
3 篇论文
Fast Adaptation with Meta-Reinforcement Learning for Trust Modelling in Human-Robot Interaction
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019
Learning Socially Appropriate Robot Approaching Behavior Toward Groups Using Deep Reinforcement Learning
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2019
A Generalized Framework for Self-Play Training
IEEE Conference on Games (CoG), 2019
2018
5 篇论文
收起
展开
2018
5 篇论文
When Robot Personalisation Does Not Help: Insights from a Robot-Supported Learning Study
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2018
Investigating Deep Learning Approaches for Human-Robot Proxemics
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2018
Human-Robot Proxemics Using Recurrent Neural Networks
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2018
Effects of Posture and Embodiment on Social Distance in Human-Agent Interaction in Mixed Reality
International Conference on Intelligent Virtual Agents (IVA), 2018
Bandit Learning with Concurrent Transmissions for Energy-Efficient Flooding in Sensor Networks
EAI工业网络与智能系统汇刊, 2018
2017
3 篇论文
收起
展开
2017
3 篇论文
Personalised Human-Robot Co-Adaptation in Instructional Settings Using Reinforcement Learning
IVA关于说服性具身代理的研讨会(PEACH), 2017
Less is More: Learning More with Concurrent Transmissions for Energy-Efficient Flooding
移动与普适计算国际会议, 2017
Exploring Users' Reactions towards Tangible Implicit Probes for Measuring Human-Robot Engagement
社会机器人国际会议, 2017
2016
1 篇论文
收起
展开
2016
1 篇论文
Deep Gate Recurrent Neural Network
Asian Conference on Machine Learning (ACML), 2016
2015
1 篇论文
收起
展开
2015
1 篇论文
Officehours: A System for Student Supervisor Matching Through Reinforcement Learning
智能用户界面国际会议(IUI) companion, 2015