Publications
Selected papers arranged as a working chronology. Recent work stays fully open; earlier years fold into a denser archive so the page can grow without losing proportion.
Research ledger
The papers are treated here less as announcements than as a slow record of how embodied intelligence, coordination, and machine behavior have been tested over time.
2026
3 current papers
Collapse
Expand
2026
3 current papers

Cross-Robot Behavior Adaptation through Intention Alignment
Science Robotics, 2026
Research on enabling behavior adaptation across different robot platforms through intention alignment.
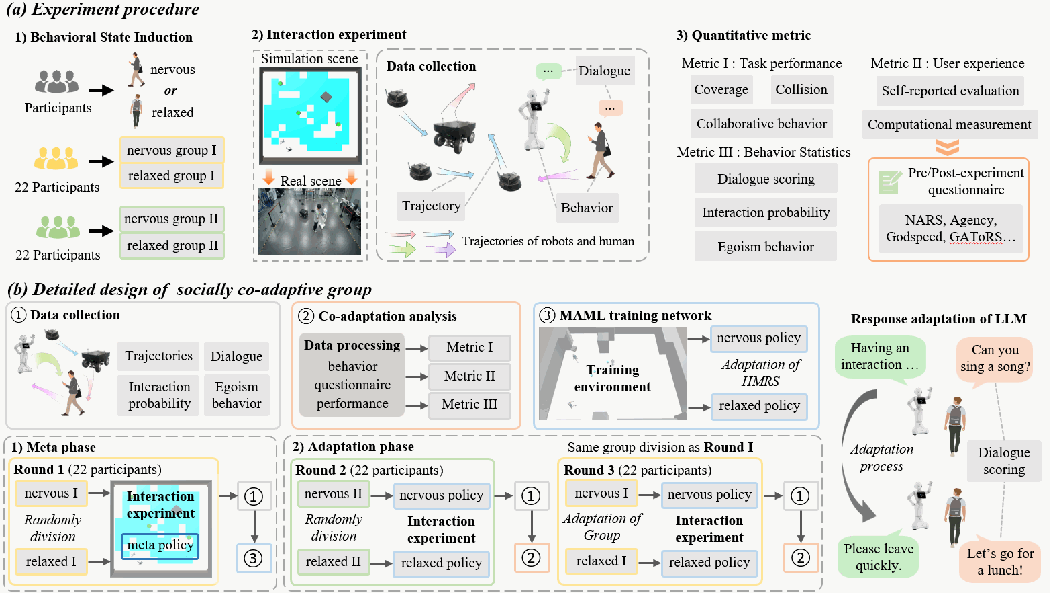
Emergent Co-Adaptive Strategies in Heterogeneous Multi-Robot Systems via Meta-Learning
IEEE International Conference on Robotics and Automation (ICRA), 2026
Meta-learning for heterogeneous robot teams that adapt between egoistic and cooperative strategies in human-facing coordination.

ReBeCA: Unveiling Interpretable Behavior Hierarchy behind the Iterative Self-Reflection of Language Models with Causal Analysis
arXiv, 2026
A causal-analysis framework for modeling the hidden behavior hierarchy behind iterative self-reflection in language models.
2025
7 papers
Collapse
Expand
2025
7 papers
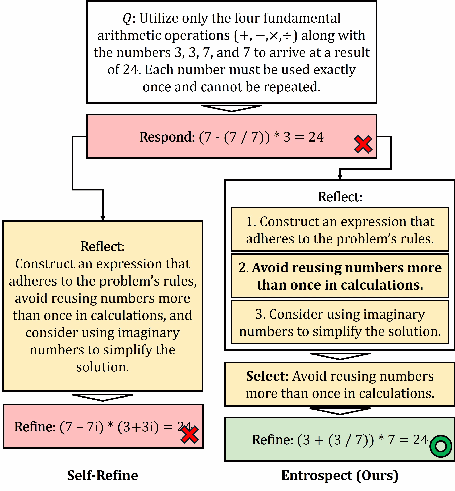
Entrospect: Information-Theoretic Self-Reflection Elicits Better Response Refinement of Small Language Models
Findings of ACL, 2025
An information-theoretic approach to self-reflection for small language models, aimed at better refinement with lower waste.
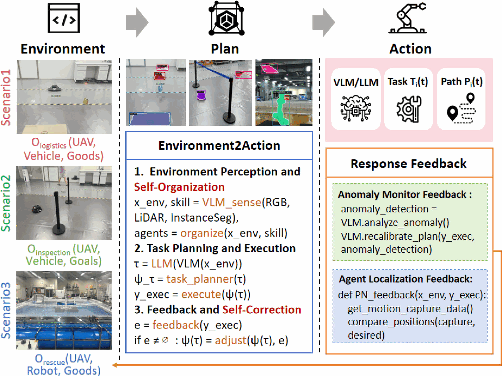
OC-HMAS: Dynamic Self-Organization and Self-Correction in Heterogeneous Multiagent Systems Using Multimodal Large Models
IEEE Internet of Things Journal, 2025
A multimodal large-model framework for role allocation, adaptive planning, self-correction, and dynamic organization in heterogeneous agents.
Unlocking Drone Perception in Low AGL Heights: Progressive Semi-Supervised Learning for Ground-to-Aerial Perception Knowledge Transfer
IEEE Transactions on Intelligent Transportation Systems, 2025
Progressive semi-supervised learning for viewpoint-shifted perception, transferring structure from ground views to low-altitude drone imagery.
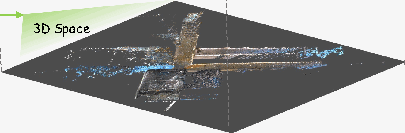
VLONS: Vision-Language Based Occlusion-Aware Neural Rendering System for Multi-View Scene Understanding
IEEE Transactions on Consumer Electronics, 2025
A vision-language neural rendering system for multi-view scene understanding under occlusion and structural ambiguity.
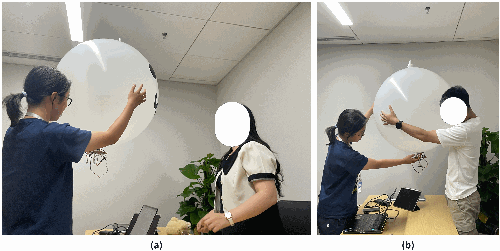
Understanding Users' Perceptions and Expectations toward a Social Balloon Robot via an Exploratory Study
ACM Symposium on User Interface Software and Technology (UIST), 2025
An exploratory study to understand user perceptions and expectations of a social balloon robot.

Towards VLM-Based Physical Intelligence: Fine-Grained Understanding of Object’s Deformability from Images
arXiv, 2025
Explores how large vision-language models can infer physical deformability cues from visual evidence.
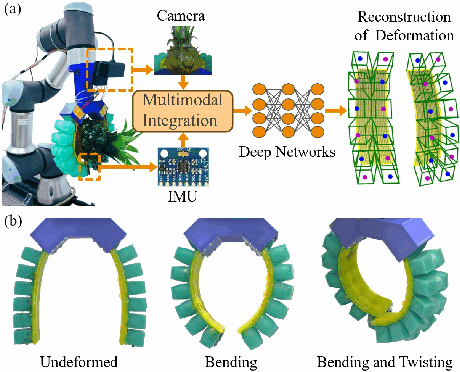
Multimodal Deformation Estimation of Soft Pneumatic Gripper During Operation
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
Combines camera and IMU sensing to estimate the deformation state of a soft pneumatic gripper during operation.
2024
4 papers
Collapse
Expand
2024
4 papers
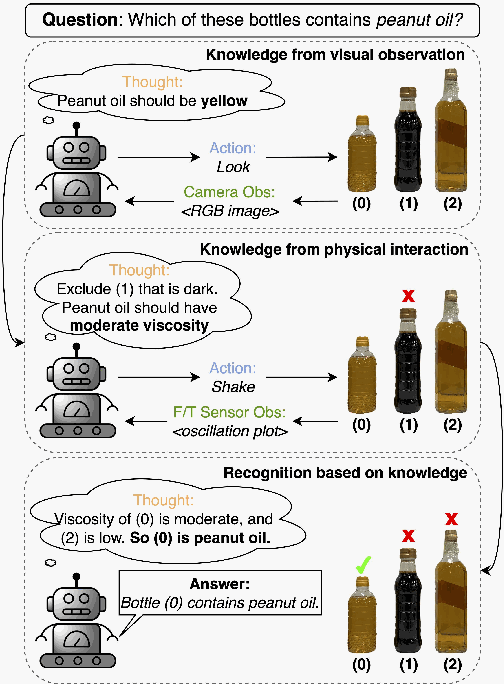
Robot Liquid Perception Through Physical Reasoning and External Knowledge Injection in VLMs
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
Liquid recognition through physical reasoning, weak visual evidence, and structured knowledge injected into vision-language models.
Cooperative Surface Inspection with Heterogeneous Mobile Robots Using Deep Reinforcement Learning
Manuscript, 2024
A deep reinforcement learning framework for cooperative inspection by heterogeneous mobile robots.
Transformable Inspection Robot for Infrastructure Maintenance with Large Language Model-Based Agentic System
IEEE International Conference on Advanced Robotics (ICAR), 2024
An inspection robot system that combines transformable embodiment with a large-language-model agentic layer.
PepperPose: Leveraging Physical Symmetry for Fast and Stable Human Pose Estimation
arXiv, 2024
Uses embodied symmetry priors to improve speed and stability in human pose estimation.
2023
5 papers
Collapse
Expand
2023
5 papers
Asymmetric Self-Play-Enabled Intelligent Heterogeneous Multirobot Catching System Using Deep Multiagent Reinforcement Learning
IEEE Transactions on Robotics, 2023
Learn2Agree: Fitting with Multiple Annotators Without Objective Ground Truth
TML4H Workshop at ICLR, 2023
Asymptotically Efficient Estimator for Range-Based Robot Relative Localization
IEEE/ASME Transactions on Mechatronics, 2023
An Intention Inference Method for Space Non-Cooperative Target Based on BiGRU-Self Attention
Advances in Space Research, 2023
Boosting Lightweight Depth Estimation via Knowledge Distillation
International Conference on Knowledge Science, Engineering and Management (KSEM), 2023
2022
7 papers
Collapse
Expand
2022
7 papers
Multilevel Hierarchical Network with Multiscale Sampling for Video Question Answering
Manuscript, 2022
Abnormal Occupancy Grid Map Recognition Using Attention Network
IEEE International Conference on Robotics and Automation (ICRA), 2022
FEANet: Feature-Enhanced Attention Network for RGB-Thermal Real-Time Semantic Segmentation
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Emotion and Memory Model for Social Robots: A Reinforcement Learning Based Behaviour Selection
Behaviour & Information Technology, 2022
Learning to Coordinate for a Worker-Station Multi-Robot System in Planar Coverage Tasks
IEEE Robotics and Automation Letters, 2022
Ab-Mapper: Attention and BiCNet Based Multi-Agent Path Planning for Dynamic Environment
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
LAPO: Latent-Variable Advantage-Weighted Policy Optimization for Offline Reinforcement Learning
Advances in Neural Information Processing Systems (NeurIPS), 2022
2021
6 papers
Collapse
Expand
2021
6 papers
Temporal Pyramid Transformer with Multimodal Interaction for Video Question Answering
Manuscript, 2021
Invariant Filtering for Bipedal Walking on Dynamic Rigid Surfaces with Orientation-Based Measurement Model
Manuscript, 2021
Meta Reinforcement Learning Based Sensor Scanning in 3D Uncertain Environments for Heterogeneous Multi-Robot Systems
Manuscript, 2021
Leveraging Activity Recognition to Enable Protective Behavior Detection in Continuous Data
Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies (IMWUT), 2021
A Dataset of Human and Robot Approach Behaviors into Small Free-Standing Conversational Groups
PLOS ONE, 2021
Ab-Mapper: Attention and BiCNet Based Multi-Agent Path Finding for Dynamic Crowded Environment
arXiv preprint arXiv:2110.00760, 2021
2020
3 papers
Collapse
Expand
2020
3 papers
Machine Behavior Development and Analysis Using Reinforcement Learning
Doctoral thesis, Uppsala University, 2020
Recognizing Micro-Expression in Video Clip with Adaptive Key-Frame Mining
arXiv preprint arXiv:2009.09179, 2020
Efficient Learning of Socially Aware Robot Approaching Behavior Toward Groups via Meta-Reinforcement Learning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
2019
3 papers
Collapse
Expand
2019
3 papers
Fast Adaptation with Meta-Reinforcement Learning for Trust Modelling in Human-Robot Interaction
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019
Learning Socially Appropriate Robot Approaching Behavior Toward Groups Using Deep Reinforcement Learning
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2019
A Generalized Framework for Self-Play Training
IEEE Conference on Games (CoG), 2019
2018
5 papers
Collapse
Expand
2018
5 papers
When Robot Personalisation Does Not Help: Insights from a Robot-Supported Learning Study
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2018
Investigating Deep Learning Approaches for Human-Robot Proxemics
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2018
Human-Robot Proxemics Using Recurrent Neural Networks
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2018
Effects of Posture and Embodiment on Social Distance in Human-Agent Interaction in Mixed Reality
International Conference on Intelligent Virtual Agents (IVA), 2018
Bandit Learning with Concurrent Transmissions for Energy-Efficient Flooding in Sensor Networks
EAI Endorsed Transactions on Industrial Networks and Intelligent Systems, 2018
2017
3 papers
Collapse
Expand
2017
3 papers
Personalised Human-Robot Co-Adaptation in Instructional Settings Using Reinforcement Learning
IVA Workshop on Persuasive Embodied Agents for Behavior Change (PEACH), 2017
Less is More: Learning More with Concurrent Transmissions for Energy-Efficient Flooding
International Conference on Mobile and Ubiquitous Systems: Computing, Networking and Services, 2017
Exploring Users' Reactions towards Tangible Implicit Probes for Measuring Human-Robot Engagement
International Conference on Social Robotics, 2017
2016
1 paper
Collapse
Expand
2016
1 paper
Deep Gate Recurrent Neural Network
Asian Conference on Machine Learning (ACML), 2016
2015
1 paper
Collapse
Expand
2015
1 paper
Officehours: A System for Student Supervisor Matching Through Reinforcement Learning
International Conference on Intelligent User Interfaces (IUI) Companion, 2015