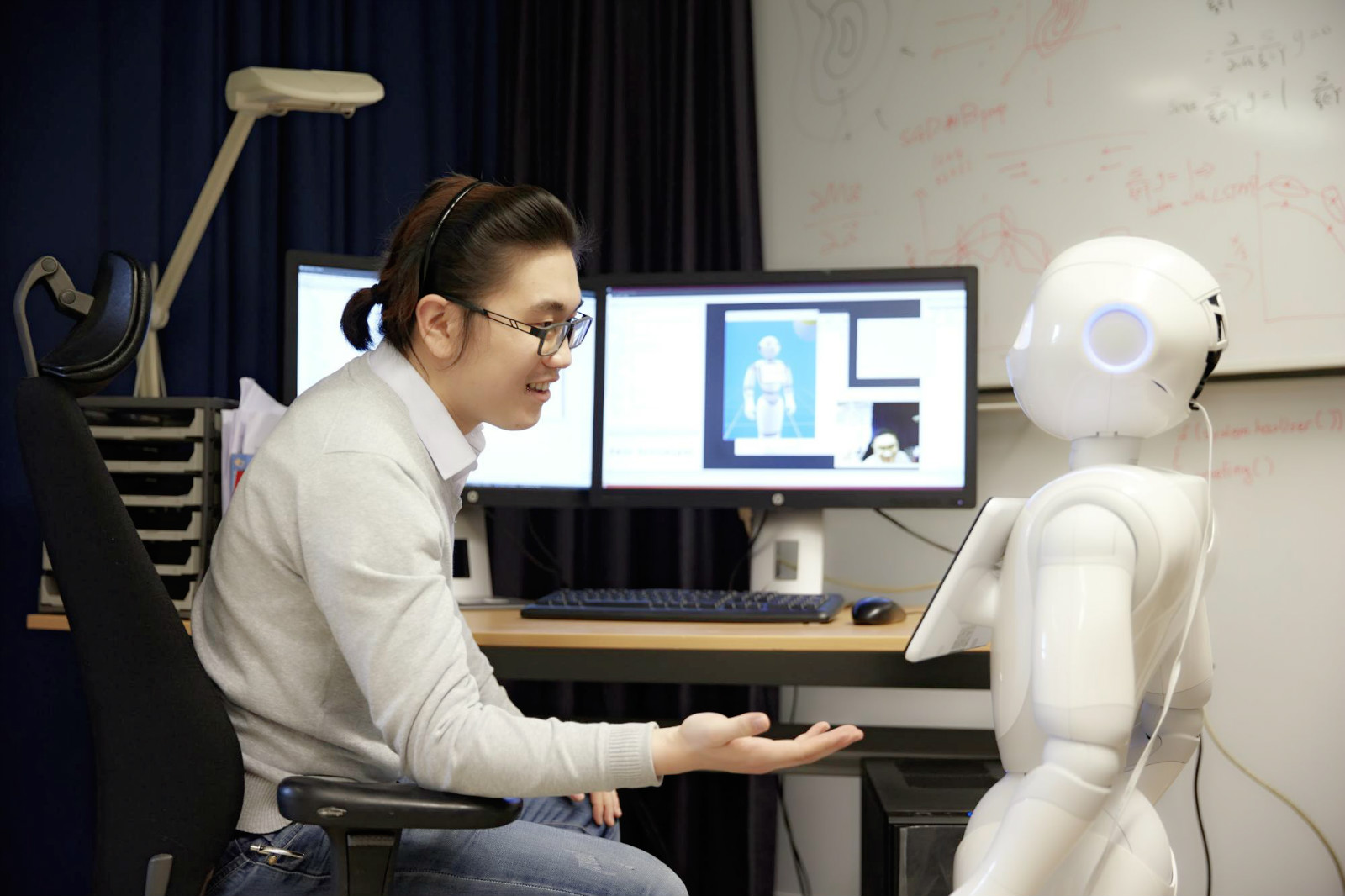
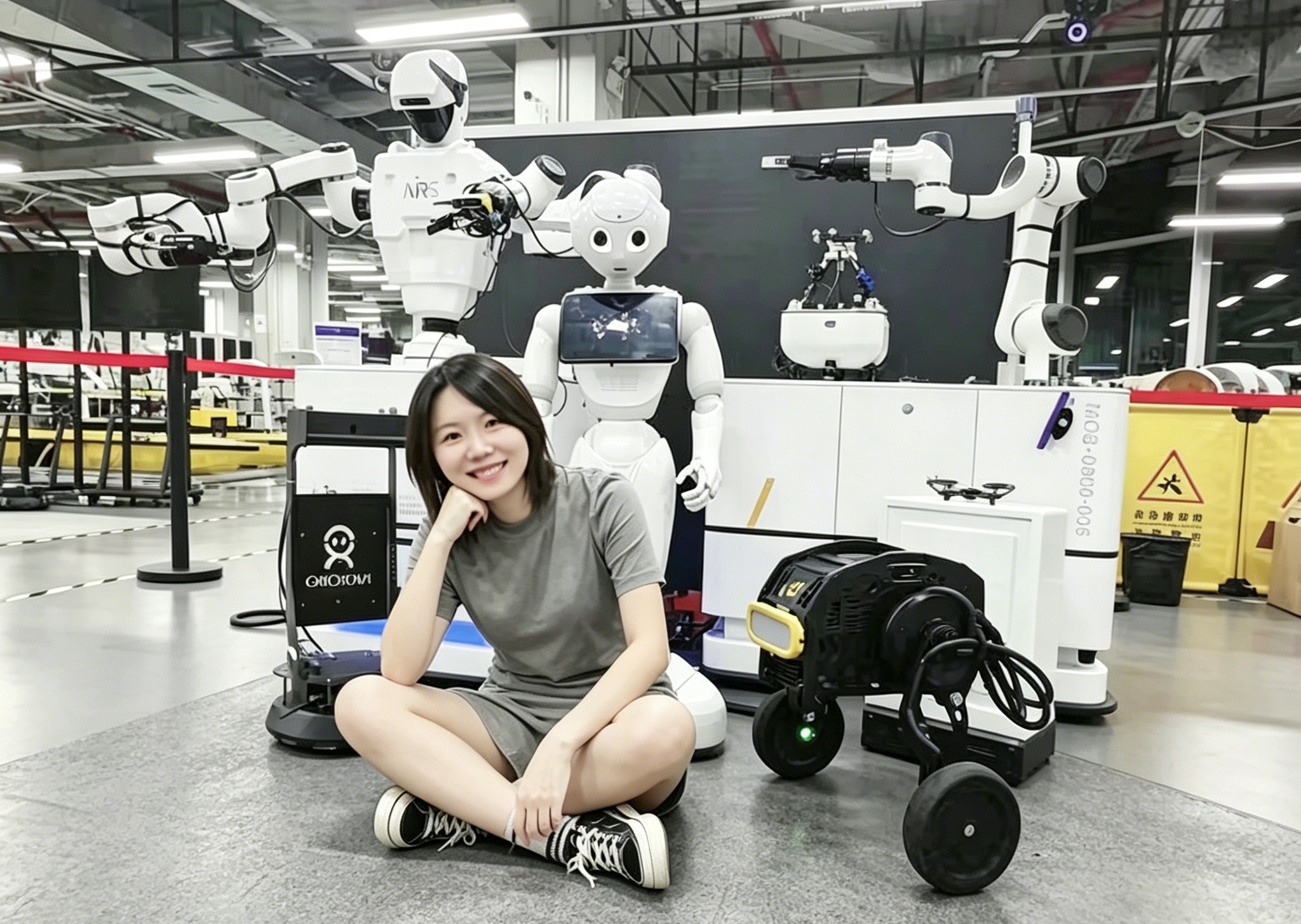
社会化机器人实验室
研究城市级的异构多机器人社会系统。从人形、四足、无人机、轮式平台到自重构模块机器人,不同构型间不共享同一套传感器、运动语法或环境表征,却必须共同构成可运转/共生的社会秩序。核心问题是:在如此形态不对称的条件下,协调、角色分化与集体规范如何产生。具身智能驱动的机器行为学是我们切入这一问题的路径——耦合的感知-运动回路如何涌现集体行为,以及智能体赖以感知、行动和交流的物理条件,如何塑造乃至瓦解它们所维系的社会模式。
项目集负责人
高源
深圳市人工智能与机器人研究院
香港中文大学(深圳)
项目集共同负责人
陈晰
北京市通用人工智能研究院
一台机器人是一种哲学的具身。异构多机器人社会,是彼此不可化约的哲学得以共处之地。
实验室成员
实验室主管与博士后

Lin Wang
项目主管
指导/联合培养博士生



张海旭
博士研究生
张海旭不编写行为;他编写奖励景观,让失败的物理教会其余一切。
赖文强
博士研究生
赖文强的工作专注于通过具身智能体增强异构多机器人系统的集体韧性。

鞠鹏
博士研究生
研究方向为云–边–端协同演化的异构多机器人系统,面向城市级长周期任务,重点关注大语言模型在任务分解与协同决策中的演化机制,以及机器人能力的演化。
雷弘洋
博士研究生
研究方向聚焦于异构具身多智能体系统的世界模型。
吴致谦
访问博士研究生
研究方向聚焦于异构多机器人系统,重点关注知识获取与迁移。
实验室助理

卢千千
实验室人事与行政助理
联系方式
合作、访问或研究咨询,请通过联系页面联系我们。
所在地
中国深圳
所属机构
CUHK(SZ)
深圳市人工智能与机器人研究院
状态
招聘中
欢迎博士后和研究助理申请加入。